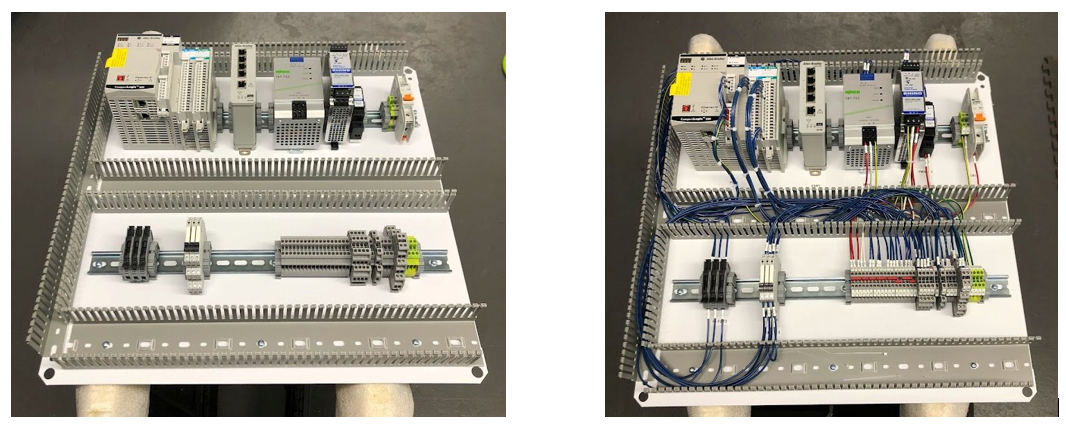
SolidWorks was used for all subpanel and enclosure layouts. For schematic design information, please refer to report (sections 7.1 and 7.2). The electrical schematics were designed using AutoCAD Electrical and can be seen in the appendix of the report.








 HMI System Overview Screen
HMI System Overview Screen
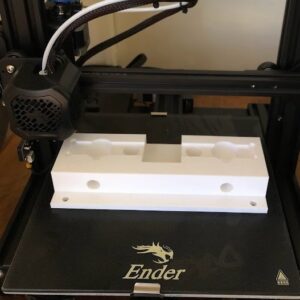 3D Printed Fixture Prototype
3D Printed Fixture Prototype